Voronで学ぶCoreXY 高速3Dプリンターの代名詞 モーターが協調運動する機構が面白い
いやー、考えた方天才ですね・・・。CoreXYは日本が誇る高速造形機G-ZEROや、SnakeOil-XYなどにも採用されている機構です。一般向け?では高速造形プリンターBamboo LabのX1CやClealityのK1シリーズ等最近目にすることが多い印象です。自分は今Voron0.2を製作中ですが機構について知っておくと、トラブルの際にも役立つと思いましたので調べてみました。
CoreXYとは
当ブログでも何回か出てきていますが、最近のFFF(FDM)機のトレンド、高速造形に大きく関わっているのがこのCoreXYという機構になります。私が所持しているSnapmakerやAnkermakeはいずれも門型のプリンターでベッドが前後(Y方向)に稼働し、ツールヘッドが横方向(X軸)と上下方向(Z軸)に動くタイプのプリンターですが、CoreXY方式のプリンターの場合はツールヘッドが前後方向(XY軸)に同時に動きます。
また、実際に動く可動部分(XY方向)にはモーターがないことも特徴です。2つの固定されたモーターが協調運動することでX軸とY軸を同時に制御する機構、コレがCoreXYになります。この機構は私が調べた範囲では元々、2012年頃にマサチューセッツ工科大学で考案された方法で、テクニックとして紹介され、特許化などはされなかったようですね。私たちとしてはありがたい限りですが、良かったんでしょうか?
MITのページと考案者?の方の古いwebページへのリンクはこちらです。古すぎて何も暗号化されていません。ご留意ください。CoreXYの利点はページで紹介されているように大きく3点あり「速い」「シンプル」「汎用性」です。分かっていればなるほどですが、考え付いた方はやはり天才ですよね・・・。
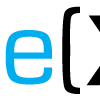

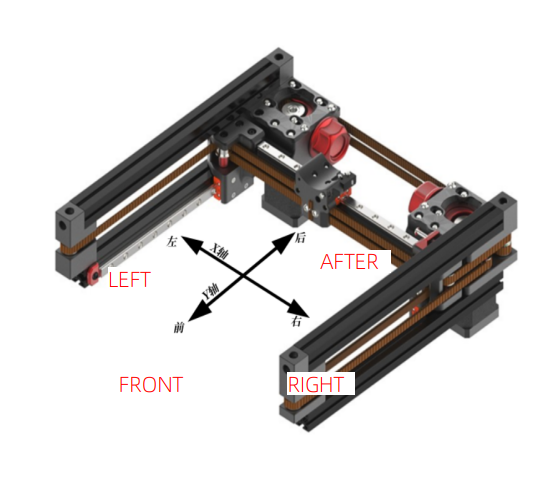
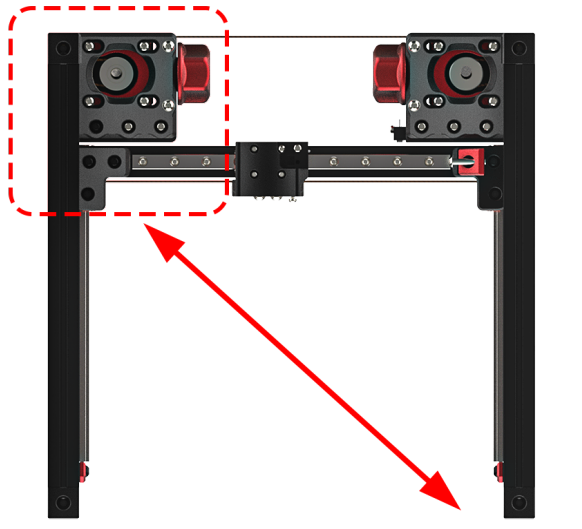
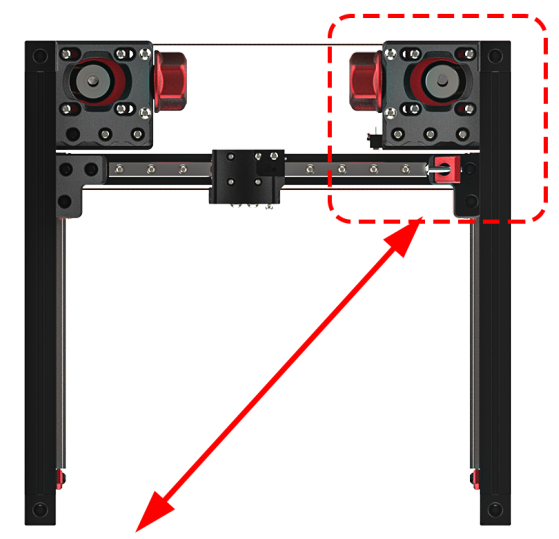
次に自分が製作中のVoronの写真で見てみます。先ほど触れましたがCoreXYではこの2軸を動かすモーターが両方とも固定されており、可動部分には動力がありません。ベルトはお互いに対称に近い形で上下に分けて2本取り付けられています。結果として、モーターが同じ方向に回転するときはX軸方向に、逆方向に回転するときはY軸方向にツールヘッドが移動します。片側のモーターのみが回ると斜めに移動することになります。モーターが協調運動することで、X軸とY軸を同時に制御できるため高速での動作が可能になります。とはいえ、これだけだとどうベルトが張られているかわからないですよね・・・。
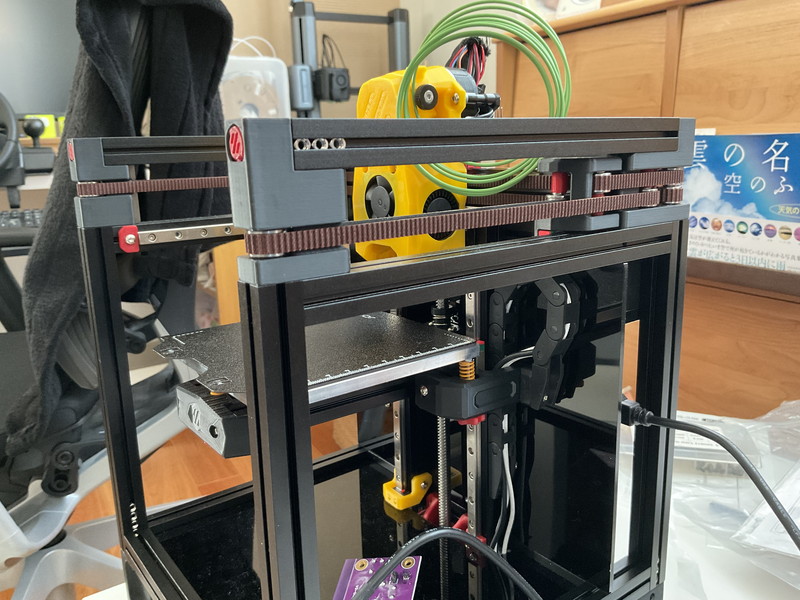

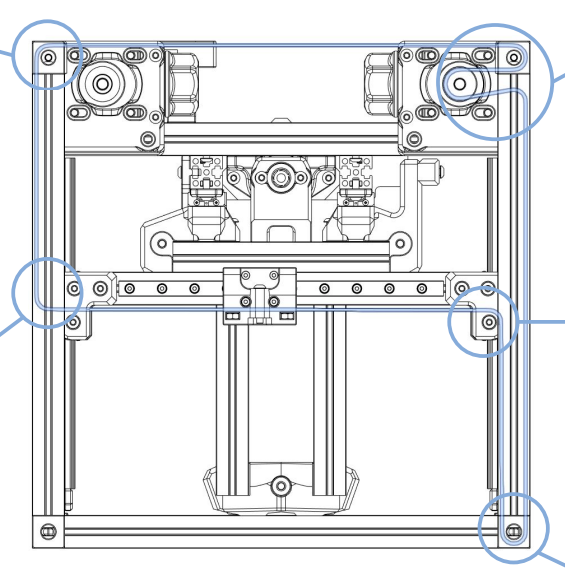
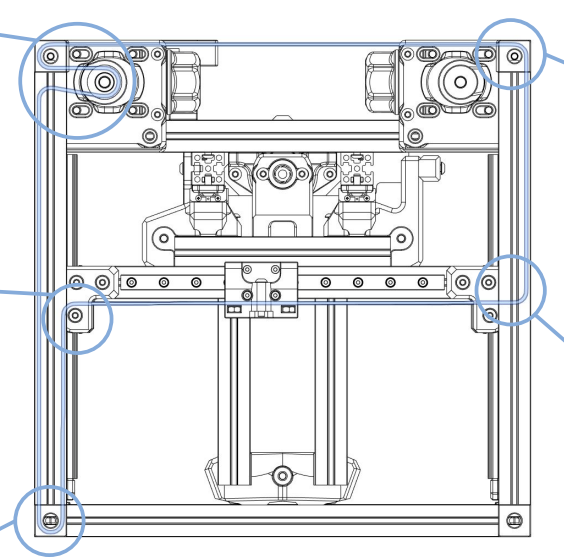
ということで次に提示しているのはVoronのマニュアルとSIBOORのサプリメントマニュアルの抜粋(図の下のリンク参照)です。上からみた図になりますが、ベルトの左右の違いや可動部分の構造がわかりやすいかと思います。また、片方のみモーターが動いた場合は斜めの動きになることがイメージできるかと思います。
百聞は一見に如かず 興味深い動き
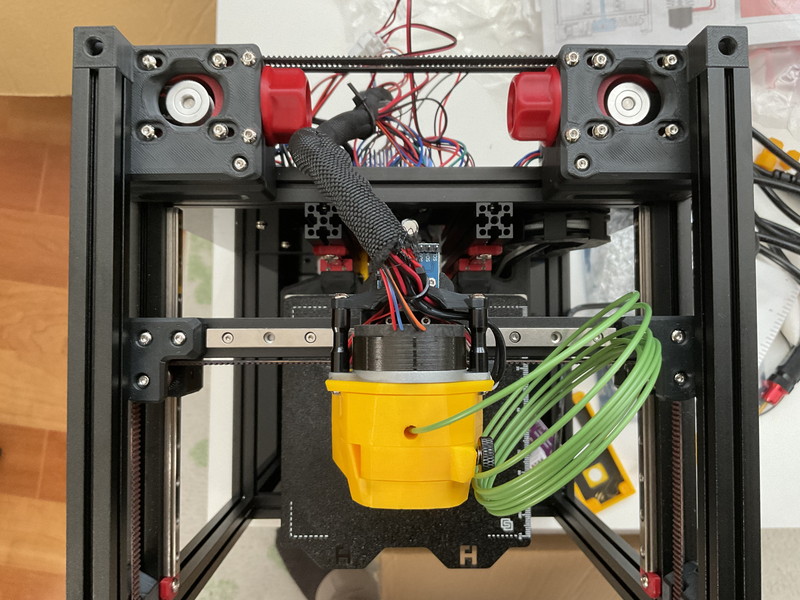
とはいえ、なかなかイメージしにくいですよね。ということで、実際の動きを見てみましょう。これ、自分でやってみるとものすごく面白いですよ。モーターの上には回転方向が判るように75%サイズのBenchy(通称ナナゴーベンチー)を載せてみました(笑)。
どうでしょうか?動きの方向とモーターの回転方向、興味深いですよねぇ・・・。
このベルトが動作してXY移動をする仕組みについては下記動画がおススメです。英語なのでちょっととっつきにくいかもしれませんが、紙を使って動きとともに説明されているので理解しやすいと思います。良かったら見てみてください。「へえー!」と思うこと請け合いです。
メリット、デメリットについて
メリットは既に上にも書いてありますが、一応ここにデメリットとセットで簡単に挙げさせていただきます。基本的にデメリットは精密である必要があるためコストやメンテナンス、調整等の要素です。上のVoronの構造もそうですが、2つのベルトが全く同じように動くためにかなり強固なフレームであることが前提条件になります。そのうえでモーターの動きと軸の動きが1対1対応していないためにしっかり調整しないとうまく協調できず、正確に動いてくれません。特にベルトのテンションを左右合わせるのは大切で、これが出来ていないときれいに円運動が出来なくなります。
| メリット | デメリット |
| モーターが可動部(XY)にないため軽量化が可能 | 機構が複雑、精密さが必要 コストがかかる |
| 協調運動による高速化が可能 | ベルトの経時的な摩耗、ゆるみが発生する |
| 汎用性が高い | ベルトの張力や長さを左右で均一にする必要がある |
一方でCoreXYのメリットはやはり大きく、頻繁に動く方向が変わるXYの制御を軽量化し、さらに協調して最小限の動作で行えることによる高速性は他の方式では実現困難だと思います。特に加速度についてはこの方式が圧倒的に高速に出来るのではないかと思います。また、基本機構はサイズが変わっても共通化できますので汎用性が高いのも特徴ですね。
正常に機能するためのチェックポイント
こういった機構を理解しておくことで、うまく動かなくなった際にも対応がしやすい、はず。ということで動きがうまくいっていないときのチェックポイントを考えてみました。個人的に思ったのはこれくらいです。(これも加えて!という声、お待ちしています)
- 構造躯体にゆるみやゆがみがないか
- ベルトの長さが同一か(組み立て時)
- ベルトの張力が均一か(テンションをHzでチェックすることが推奨)
- モーターに異常がないか(動作方向やギアのゆるみ等)
- 円柱を造形してみて真円度に問題がないか、斜め方向への移動は?
このあたりを確認すれば概ね問題の切り分けが出来るのではないかと思います。左右のバランスの崩れが品質に直結しますので自分が今製作中のVoronで問題が発生した時にはまずここをチェックすることにします。
・・・もちろん、私個人に発生した問題については今後も当ブログで報告、共有させていただきますのでお楽しみに?
まとめ
CoreXYについて、興味湧いてきましたか?2つのモーターが協調運動することでX軸とY軸を制御する仕組みは、非常に面白くてキレイだと感じました。私の場合、この仕組みに触れたくてVoronを製作しようと思ったと言っても過言ではありません。またVoronの制作についてはブログにさせていただきますね。興味を持っていただいた皆さん、2台目以降の3Dプリンターではぜひこちらの世界へ・・・?
またその時にご紹介しますが、TwitterにはVoron、SnakeOil-XY等をガシガシ作って使用されている猛者の方々が沢山います。私などはまだまだひよっこですが、お世話になっている皆様、いつもありがとうございます!これからもよろしくお願いいたします!
今回も最後までお読みいただきありがとうございました。